Jumping Robot
During Winter 2019, I enrolled in ME112, Mechanical Systems Design. The final group project in the class was to create a jumping robot that could store energy for 10 seconds, and then release it in an upwards jump. Our group’s design was inspired by a flea’s ability to store energy in linkage-like legs, and then release it in one explosive motion.
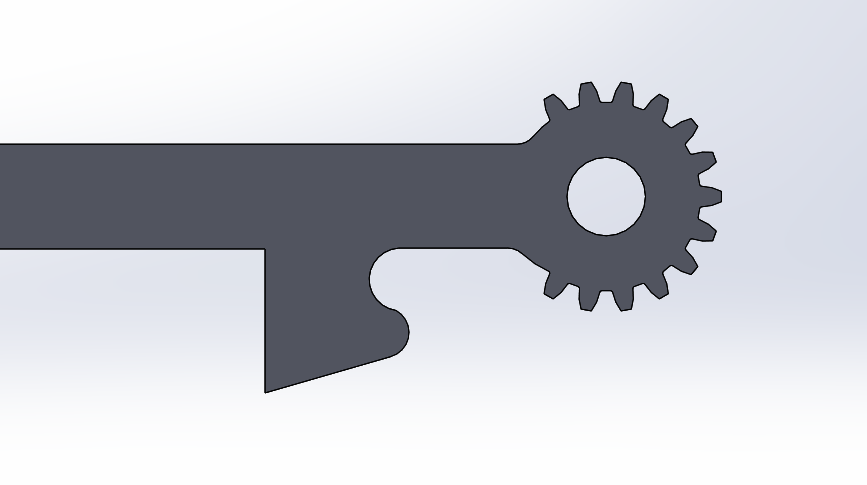
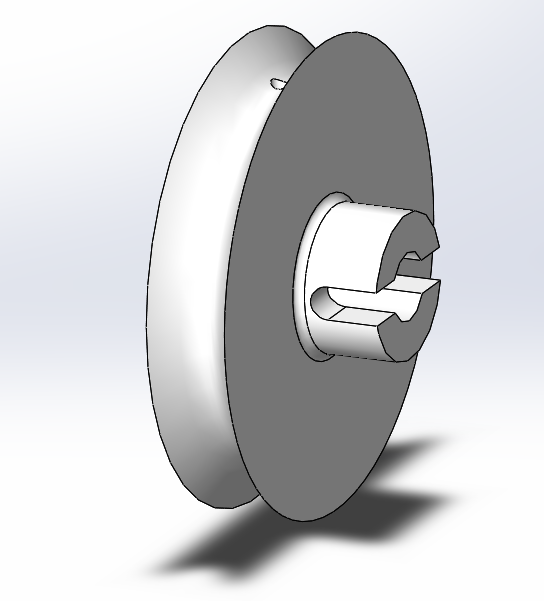
My role in the group was to develop the overall mechanical design of the robot, as well as fabricating the majority of the robot. Our design utilizes gears that I designed in CAD that constrain the overall motion of the robot, while a winding pulley (powered by a motor on top) stores energy in a spring located at the leg joints. The pulley’s string is released when the robot reaches a sufficiently depressed state, simultaneously allowing the spring to snap back into position and release the robot upwards.
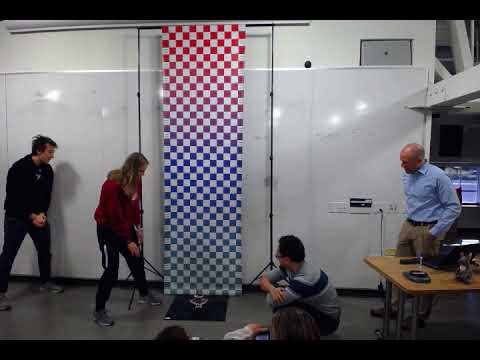
Our plucky robot Stevie finished in the top five highest jumps across the class with a height of 42 inches, and also won the class-wide robustness challenge for having the highest jump after surviving an impact. The competition served as a synthesis for the engineering principles that I had previously studied in a purely academic context, and also challenged me to use my design learning in a practical way to design a functional robot.